Realization of Parameterization and Design Assembly Automation of Aircraft Control System Parts with UG
1 Introduction
The development of integrated special software in the environment of general CAD, CAE and so on is a good development direction and effective way of general software [1]. Based on the development and integration of low-end CAD software, it has been researched at home and abroad for many years, and has achieved many successful applications and accumulated a lot of experience. Based on the development and integration of high-end CAD software, there are many people interested in research in China. There are few people, and the research is still in the beginning and exploration stage. There are few lessons to learn from, and there is no mature practical result.
The aircraft control system is a very complex subsystem in the aircraft system. There are many factors to consider when designing. It is necessary to consider not only the functional requirements, but also the requirements of strength and rigidity, which makes the design difficult. Aircraft use practices have shown that many of the problems that arise during use are due to poor design considerations, as are the operating systems. One of the main requirements of modern design systems is the reusability of existing designs, so one of the effective ways to solve this problem is to use a knowledge-driven design to build an advanced aircraft control system design platform. This not only improves product quality, shortens the development cycle, reduces design costs, but is also very beneficial for reducing labor intensity.
UG is a general-purpose software integrating CAD/CAE/CAM. It has powerful CAD and CAM functions. Based on complete 3D solid composite modeling, feature modeling and assembly modeling technology, it can design complex product models and can be used. The development process of the whole product; at the same time, UG has good openness, providing users with powerful secondary development tools, including UG/Open Menu Script for users to customize menus, for users to construct user interface design of UG style dialog box. Module UG/Open UIStyler, UG/Open [2] for user development. With these tools, users can develop UG and implement the corresponding functions according to their specific requirements, such as the special needs of the industry.
2 parameterized design of parts
The purpose of the parametric design approach is to store the entire process of design, thereby designing a family rather than a single product model [3]. In computer-aided design systems, different models of products often have the same size and the same structure. When mapped to a geometric model, the geometric information is different and the topology information is the same. Therefore, based on the topology classification of parts, a parametric model is established to ensure the geometric topological relations in the design process are consistent. At the same time, the geometric feature parameters are extracted and customized, and the corresponding mechanism of geometric information and parameters is established. Values ​​modify geometry entities directly or indirectly to implement parametric design. In the UG environment, the parameter function expression (Expression) can be edited by the corresponding function function provided by UG/Open, that is, the parameter value is modified, thereby editing the geometric entity to realize the parameterized design. In order to ensure the correct call of the assembly program to the components, to achieve automatic coordinate positioning during the assembly process, the orientation reference information for the assembly should also be added to the parameterized model.
2.1 Analysis of geometric parameters of main components of hard mechanical control system
The transmission mechanism of the aircraft mechanical control system is usually divided into three types: soft, hard and hybrid. Among them, the rigid transmission mechanism is mainly composed of components such as rocker arm and transmission rod [4].
2.1.1 rocker arm
Rocker arms are mainly used to transmit forces, displacements or change their size and direction, and some are only for support. The structural form typically includes a single rocker arm, a double rocker arm, and a composite rocker arm.
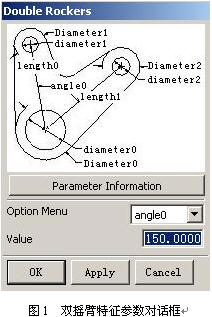
The single rocker arm extracts 5 characteristic parameters, and the double rocker arm extracts 9 geometric feature parameters. The composite rocker arm should be analyzed. The rocker arm parameters mainly include the arm length of the rocker arm and the angle between the rocker arms. Figure 1 shows the definition of the dual rocker geometry parameters.
2.1.2 Transmission rod
The transmission rod, also called the tie rod, consists of the joints and tubes at both ends. The one or both end tab joints are usually designed to be threaded for easy adjustment of the rod length for system assembly. According to its structural characteristics, two geometric characteristic parameters are extracted, one is the angle between the shaft vector of the two ends of the ear piece joint, and the other is the length of the rod, that is, the distance between the centers of the shaft joints of the two ends of the transmission rod.
2.2 Parametric design of parts based on UG secondary development
The implementation process will be described below by taking a double rocker as an example.
Use the UG/Open UIStyler to customize the double rocker dialog, as shown in Figure 1. After the customization is completed, the three files generated are DR.h, DR_template.c and DR.dlg. According to the specific requirements of encoding DR_template.c, the parametric design of the double rocker arm can be realized. The process is described as follows. The function of the Parameter_Information control is to display the feature parameter information, and the function of the Apply control is to edit the feature parameter information.
Parameter_Information()//Display feature parameter information {
UF initialization, obtain the UG/Open API License;
Get the feature parameters of the part to be accessed according to the control ID;
If (the characteristic parameter to be accessed exists)
Display feature parameter information;
Else
Prompt the user and give possible reasons;
The UF terminates and the occupied license is returned;
}
Apply()//Edit feature parameter information {
UF initialization, obtain the UG/Open API License;
Get the feature parameters of the part to be accessed according to the control ID;
If (the characteristic parameter to be accessed exists)
{
Get the new value of the feature parameter to be accessed;
If (the new value of the parameter is within the allowable range)
Modify the feature parameter value;
Else
Prompt the user to reassign;
}
Else
Prompt the user and give possible reasons;
The UF terminates and the occupied license is returned;
}
Create the UG menu file DR.men with the following contents:
VERSION 170
EDIT UG_GATEWAY_MAIN_MENUBAR //Edit main menu BEFORE UG_HELP //Place the first level menu before Help CASCADE_BUTTON UISTYLER_DLG //The menu type is drop-down LABEL Para&meter //Define the menu title and shortcut key END_OF_BEFORE //End the editing of the first level menu MENU UISTYLER_DLG //Edit second level menu BUTTON DOUBLEROCKERS_BTN //Second level menu ID
LABEL Double Rockers... //Define the menu title ACTIONS DR.dlg //Run DR.dlg
END_OF_MENU //End the editing of the second level menu
Next page
Xi'an Jmlai Bio-Tech Co., Ltd. , https://www.jmlaisarms.com